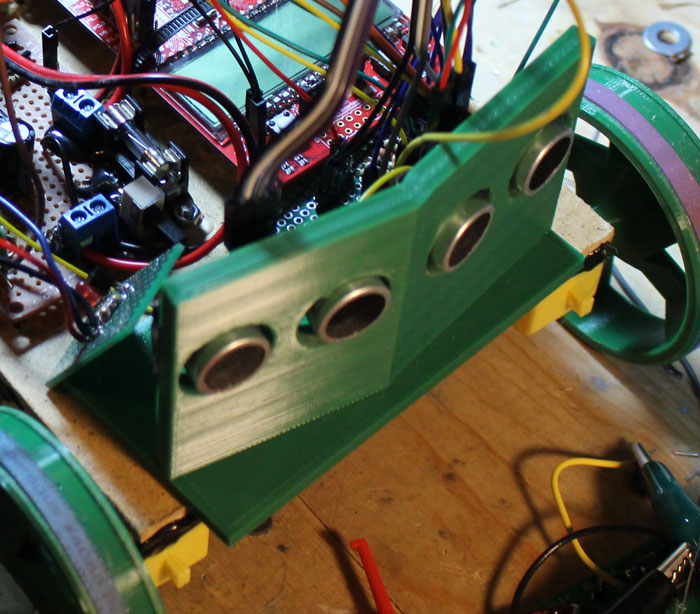
For our embedded systems class at school, we got a chance to build a remote control car. Of course, we immediately made it more interesting by giving it the ability to avoid obstacles. The obstacle avoidance actually worked 60% of the time.
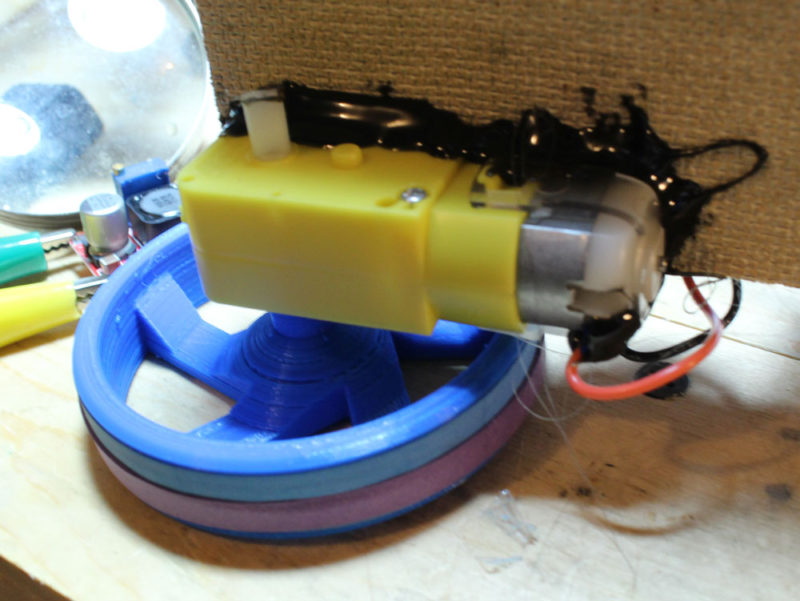
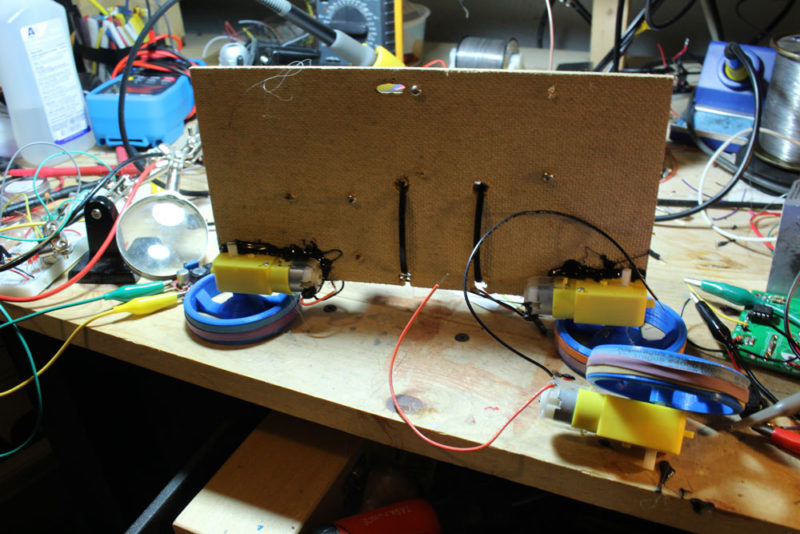
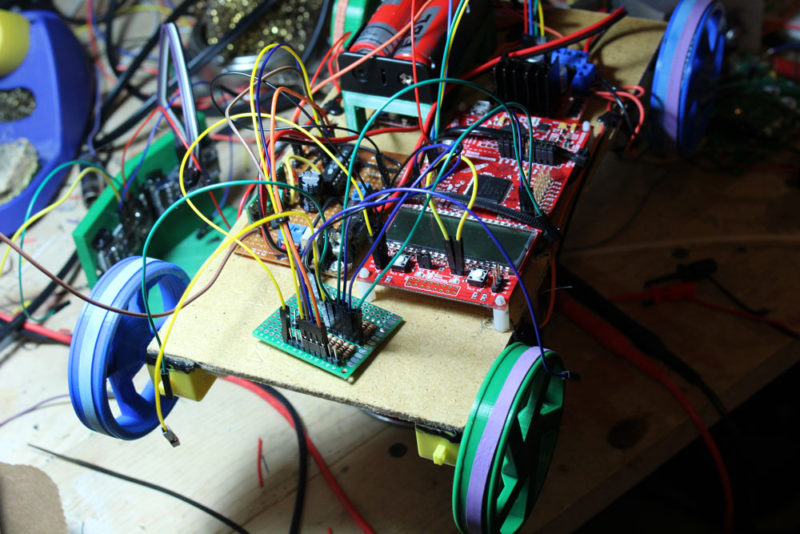
It was my job to do the hardware. My buddy Kyle handled the programming. This is my first time dealing with RF. I kept it simple. I used cheap 433Mhz radios. Holtek makes the HT12 series of chips that radically simplified the remote control and receiver. The wheels were 3D printed. The base was a piece of scrap from an ancient TV a dead lady gave me. The microcontroller was a TI MSP430.

Kyle and I wanted the car to turn faster. By far, the easiest way to make a car that, more or less, uses tank turning physics is to slam the inside set of wheels in reverse. (We were taking this obstacle avoidance thing VERY seriously.) Really, if you were headed straight into a brick wall, you may appreciate such aggressive measures.

The only problem was we were using toy gearboxes. As you can guess, we blew them out in about 20 minutes….which isn’t bad, really. So, the car didn’t last long.
In case anyone is unsure about the fear, everything you do in engineering school is motivated by fear. Enough said.